複数の画像やテキストの解釈 Robotics - Section 5

コロンビア大学とDeepMindの研究者が、GPATというトランスフォーマーベースのモデルアーキテクチャを紹介しましたこのモデルは、各パーツの形状が目標の形状にどのように対応しているかを推測し、パーツのポーズを正確に予測します
視覚空間推論を通じて新しいオブジェクトを組み立てることができる自律型ロボットシステムは、幅広い現実世界の応用において...
「AIが家庭用ロボットの計画時間を半分に減らすのを手助けします」
「PIGINetは機械学習を活用して、複雑な環境で実行可能な解決策を評価・フィルタリングすることで、家庭用ロボットのタスクと...

「3つの質問:ロボットの認識とマッピングの研磨」
MIT LIDSのLuca CarloneさんとJonathan Howさんは、将来のロボットが環境をどのように知覚し、相互作用するかについて議論し...

水中探査の革命:ブラウン大学のプリオボットが海洋の秘密を解き明かす
高度に連携し自己指導型のロボットのネットワークを想像してくださいそれらは複雑な水中バレエのように一体となり、海洋の漆...

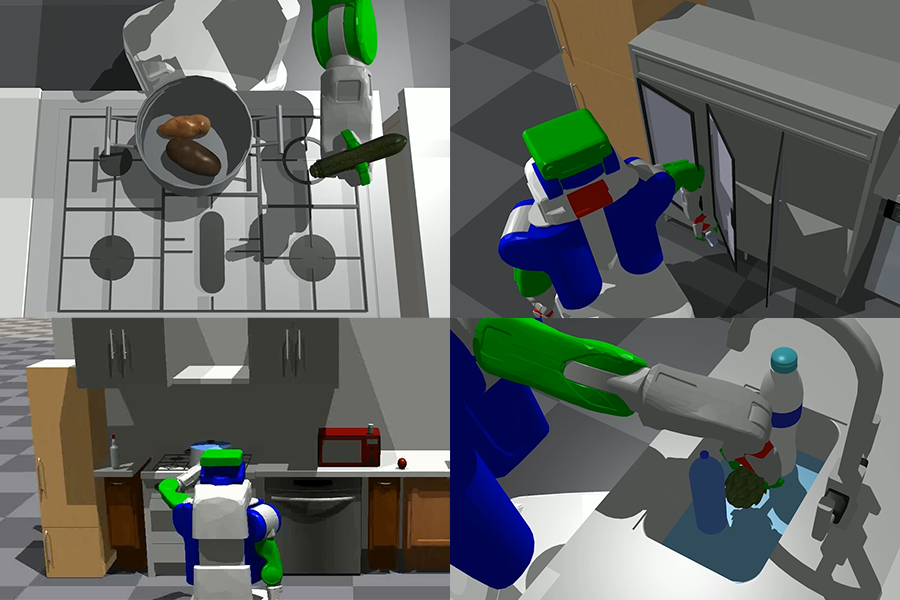
ロボティクスシミュレーションとは何ですか?
ロボットは倉庫内で商品を運搬し、食品を包装し、車両の組み立てを助けています。バーガーをひっくり返したり、ラテを提供す...
DeepMind RoboCat:自己学習ロボットAIモデル
世界的に有名なAI研究所であるDeepMindは、ロボットアームの様々なモデルを使用して幅広い複雑なタスクを実行できるAIモデルR...

様々な地形でサッカーをプレーするための四脚ロボットシステム
「DribbleBot」は、強化学習を利用して、砂地、砂利、泥地、雪などの様々な地形でサッカーボールを操ることができますまた、...

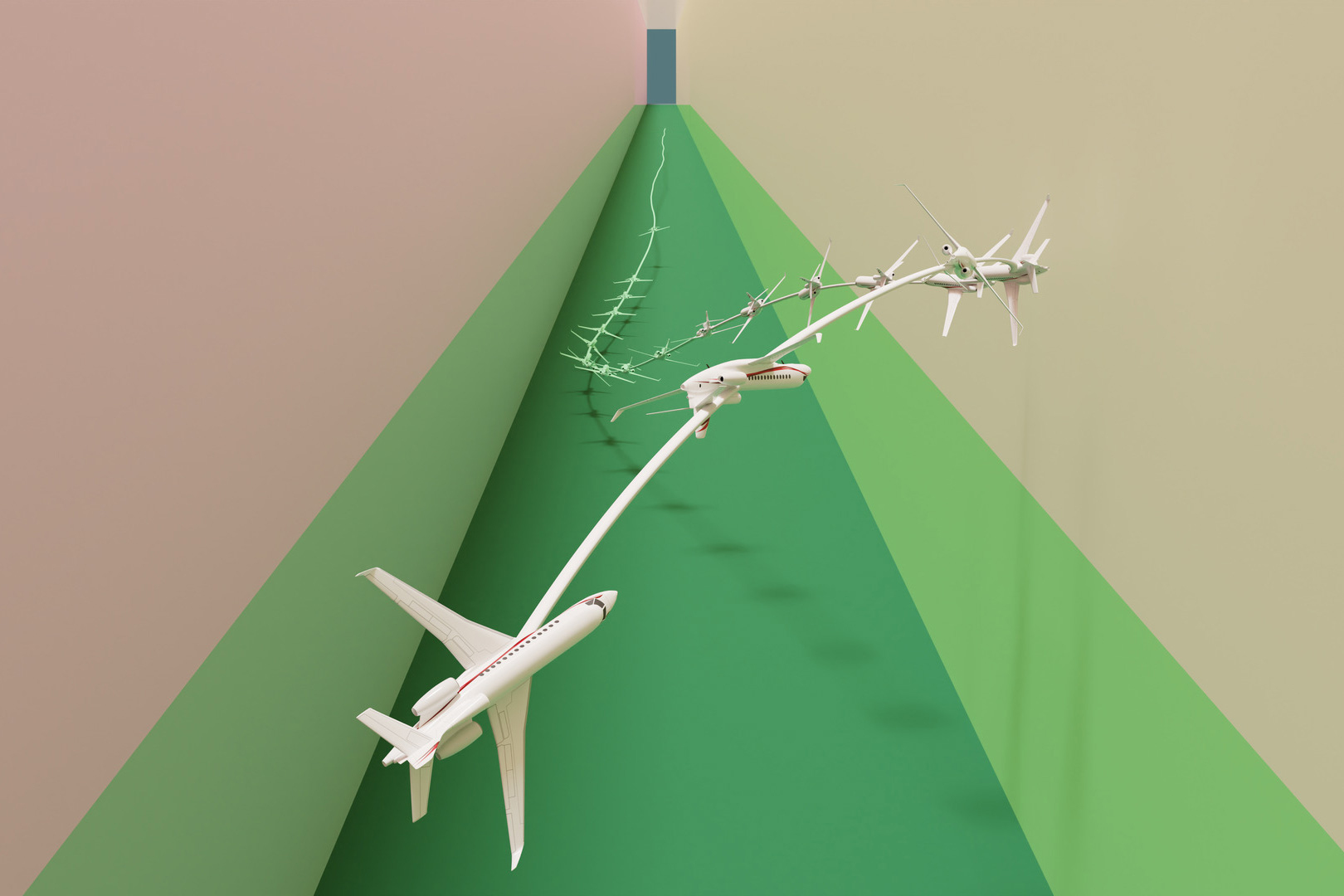
ドローンは、液体ニューラルネットワークを使用して未知の環境をナビゲートします
MITの研究者たちは、脳に着想を得た液体ニューラルネットワークを使用して、自律ドローンのナビゲーションにおける新しい進歩...
安全で信頼性の高い自動操縦飛行への一歩
安全性と安定性のしばしば相反する目標を満たすための新しいAIベースのアプローチにより、自律ロボットの制御が可能になりました
新技術における公共の利益の定義
新しいオンラインジャーナルが、テクノロジーを設計、実装、評価する個人の社会的責任について議論するために、MITコミュニテ...

- You may be interested
- フラッシュアテンション:基本原則の解説
- メタAIがNougatをリリース:科学文書を処...
- 「2023年のトップAI画像から動画を生成す...
- テックとマインドのバランス:メンタルヘ...
- 機械学習の専門家 – マーガレット・...
- モジュラーの共同創設者兼社長であるティ...
- パイプラインの夢:AWSでのMLトレーニング...
- 「FacebookとInstagramにて、Metaが新しい...
- 2023年5月のVoAGIトップ記事:Mojo Lang:...
- 企業がOpenAIのChatGPTに類似した自社の大...
- ビッグデータのための階層的クラスタリン...
- 「ベルカーブの向こう側:t-分布の紹介」
- 2023年のトップ8のChatGPTプラグイン(お...
- 「読んだものに関してのみ話すこと:LLM(...
- 「合成イメージングがAIトレーニングの効...
Find your business way
Globalization of Business, We can all achieve our own Success.