「Google DeepMindと東京大学の研究者が、WebAgentを紹介:自然言語の指示に従って実際のウェブサイト上のタスクを完了できるLLM-Drivenエージェント」
Google DeepMindと東京大学の研究者が、WebAgentを紹介


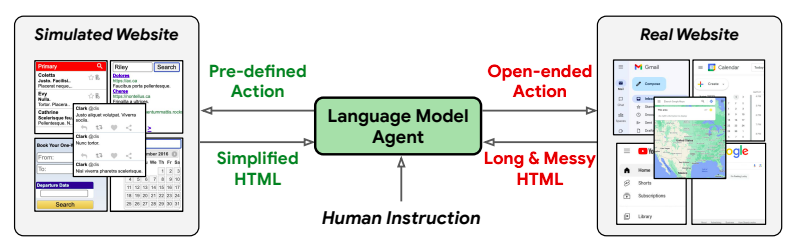
論理演算、常識、論理的な推論、質問応答のタスク、テキスト生成、さらには対話的な意思決定タスクなど、多くの自然言語の活動は、大規模な言語モデル(LLM)を利用して解決することができます。HTMLの理解能力と多段階の推論を利用することで、LLMは最近、与えられた自然言語の命令を満たすために、コンピュータのアクションの連続を通じてエージェントがコンピュータを制御したり、インターネットを閲覧したりする自律的なウェブナビゲーションで優れた成功を示しています。事前に定義されたアクションスペースの欠如、シミュレータと比較してより長いHTMLの観測、およびLLMにおけるHTMLドメインの知識の欠如は、実世界のウェブナビゲーションに否定的な影響を与えています(図1)。
命令の複雑さとオープンエンドの実世界のウェブサイトのために、事前に適切なアクションスペースを選択することは容易ではありません。最新のLLMは、HTMLテキストの処理に最適な設計を持つことは稀であり、さまざまな研究では、命令の微調整や人間の入力からの強化学習がHTMLの理解とオンラインナビゲーションの精度を向上させると主張しています。多くのLLMは、一般的なタスクの汎用性とモデルのスケーラビリティを優先するため、実際のウェブページに見られる典型的なHTMLトークンよりも短い文脈の期間を優先し、テキスト-XPathの整列やテキスト-HTMLトークンの分離などの過去のアプローチを採用していません。
そうした長いテキストにトークンレベルのアラインメントを適用することは比較的安価です。WebAgentという、人間の命令に従って実際のウェブサイトでナビゲーションタスクを実行できるLLM駆動の自律エージェントを提供するために、プログラムスペースでカノニカルなウェブ操作をグループ化します。自然言語の命令をより小さなステップに分割することで、WebAgentは以下のことを行います:
- 「研究者がChatGPTを破った方法と、将来のAI開発に与える可能性」
- 「KAISTの研究者がFaceCLIPNeRFを紹介:変形可能なNeRFを使用した3D顔のテキスト駆動型操作パイプライン」
- 『ChatGPTや他のチャットボットの安全コントロールに研究者が問題点を指摘』
- 各ステップのサブ命令を計画します。
- サブ命令に基づいて長いHTMLページをタスクに関連するスニペットにまとめます。
- 実際のウェブサイトでサブ命令とHTMLスニペットを実行します。

この研究では、Google DeepMindと東京大学の研究者が、2つのLLMを組み合わせてWebAgentを作成しました。最近作成されたHTML-T5というドメインエキスパートの事前訓練言語モデルを使用して作業計画と条件付きHTML要約を行います。Flan-U-PaLMは、グラウンデッドコードの生成に使用されます。HTML-T5には、エンコーダにローカルとグローバルなアテンション手法を組み込むことで、長いHTMLページの構造の構文と意味をよりよく捉えるように特化させることができます。これは、長いスパンのノイズ除去目標を組み合わせたCommonCrawl1によって作成された大規模なHTMLコーパスで事前訓練された自己教師ありのモデルです。既存のLLM駆動のエージェントは、各タスクごとにさまざまな例を促すために単一のLLMを使用して意思決定タスクを完了することがよくあります。しかし、これはシミュレータの複雑さを超えるため、実世界のタスクには不十分です。
徹底的な評価によると、プラグイン言語モデルとの統合戦略により、HTMLの理解とグラウンディングが向上し、より高い汎化能力を持つことが示されています。詳細な研究によれば、タスク計画とHTML要約を専門の言語モデルでリンクさせることは、タスクのパフォーマンスにおいて重要であり、実世界のオンラインナビゲーションの成功率を50%以上向上させることができます。WebAgentは、QAの精度において単一のLLMに対して静的なウェブサイトの理解タスクで優れたパフォーマンスを発揮し、優れた基準と比較可能なパフォーマンスを持っています。さらに、HTML-T5はWebAgentの重要なプラグインとして機能し、ウェブベースのジョブで先端的な結果を独自に生み出します。MiniWoB++テストでは、HTML-T5は単純なローカルグローバルアテンションモデルやその命令微調整バリエーションよりも優れた成績を収め、以前の最良の技術よりも成功率が14.9%高い結果を達成しています。
彼らは主に以下の点に貢献しています:
• 実用的なWebナビゲーションのために2つのLLMを組み合わせたWebAgentを提供しています。一般的な言語モデルは実行可能なプログラムを生成し、ドメインエキスパート言語モデルは計画とHTMLの要約を処理します。
• ローカルグローバルアテンションを採用し、大規模なHTMLコーパスを用いた長距離ノイズ除去の組み合わせによる事前トレーニングを行うことで、HTML-T5という新しいHTML特化言語モデルを提供しています。
• 実際のウェブサイトでは、HTML-T5は成功率を50%以上向上させ、MiniWoB++では従来のLLMエージェントを14.9%上回ります。
We will continue to update VoAGI; if you have any questions or suggestions, please contact us!
Was this article helpful?
93 out of 132 found this helpful
Related articles
- RT-2 新しいモデルは、ビジョンと言語をアクションに変換します
- DeepMindの研究者たちは、正確な数学的定義を用いて、連続した強化学習を再定義しました
- イギリスのインペリアル・カレッジ・ロンドンとディープマインドの研究者たちは、AIフレームワークを設計しましたこのフレームワークは、言語をRLエージェントの中核的な推論ツールとして使用します
- CMUの研究者が「WebArena」を導入:有用なエージェントのベンチマーキングを行うための4つ以上の現実的で再現可能なWeb環境となる4つ以上の現実的なWebアプリを備えたもの
- 「INDIAaiとMetaが連携:AIイノベーションと共同作業の道を開く」
- 研究者たちは「絶対的に安全な」量子デジタルペイメントを実証
- ロボットが太陽エネルギー研究を推進