「火星のためのモルフォボット:カリフォルニア工科大学がNASAのミッション候補として全地形ロボットを開発」
Caltech develops all-terrain robot as a candidate for NASA's Mars mission Morphobot for Mars
2020年、アカデミックスのモーリー・ガーリブとアリレザ・ラメザニは、現在では文字通りこの世のものではない仕事のチャンスを得ている変形ロボットを考案していました。それはNASAの火星ローバーミッションです。
カリフォルニア工科大学は、その多才なロボットを発表しました。このロボットは飛行、運転、歩行ができ、そのスキルの組み合わせにより8つの動作の組み合わせが可能です。それをMulti-Modal Mobility Morphobot、またはM4と呼びます。これは、エッジAIとロボティクスのためのNVIDIA Jetsonプラットフォームによって可能にされています。
カリフォルニア工科大学の航空学とバイオインスパイアードエンジニアリングの教授であるガーリブは、「私たちが行いたい機能の数は増えました。デザインチームに提案した最初の時点では、彼らは皆「いや」と言いました。」と述べています。
カリフォルニア工科大学は最初の研究を資金提供し、NASAとそのジェット推進研究所(JPL)は次のフェーズを資金提供し、昨年夏にノースイースタン大学の電気・コンピュータ工学の助教授であるラメザニをJPLの教員研究者として迎え入れ、さらに開発を進めました。
- 「アフリカと中東で5人の生成型AIイノベーターに会おう」
- 「Rust言語を使う開発者が増えています」
- DevOpsGPTとは、LLMとDevOpsツールを組み合わせたマルチエージェントシステムであり、自然言語の要件を動作するソフトウェアに変換するものです
そのM42バージョンは現在、NASAで火星ローバーの候補として開発中であり、ガーリブによれば、アメリカ運輸省からも関心を持たれているとのことです。
「NASAでは、現在、着陸中に変形する能力をテストしています。」と彼は言いました。
そして最近、Nature Communicationsで論文を発表したことから、ガーリブは提案にあふれかえっていると述べています。
「いきなり注目を浴びるようになったことに、私たちは少し目が回っています。」と彼は言いました。「異なる組織が異なることをしたいと考え、私たちに接触しています。」
消防、捜索救助作業
カリフォルニア工科大学の論文の背後にいるチームは、ガーリブとラメザニだけでなく、カリフォルニア工科大学航空宇宙学のポストドクトラルスカラー研究員のエリック・シヒテ、JPLのアラシュ・カランタリ、CASTのデザインエンジニアであるレザ・ネモヴィです。彼らはM4を、他の領域として多様なミッション要件に対応するために設計されていると述べています。
たとえば、火事のような場所に転がり込むことができない場合、カメラとセンサーを使用して状況を評価するために飛行し、偵察することができます。
ガーリブによれば、ロサンゼルス地域の多くの消防署がM4に関心を持ち、ガーリブに連絡してきたとのことです。
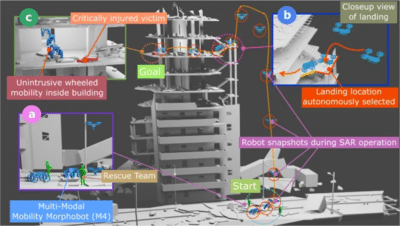
「救助活動にとっては非常に重要です。安全な場所に着陸してから現場に入る必要があります。」と彼は言いました。
多目的なドローンによる業務完了
カリフォルニア工科大学のチームは、M4を使用してドローンの配達に関連する問題を解決することも目指しています。ガーリブによれば、ドローンによる配達はこのロボットにとっては「簡単なもの」です。
彼は言います。「ドローンによる配達は問題があります。安全上の理由から、誰もが自宅や事業所の近くにドローンが着陸することを望みません。M4は人から離れた場所に着陸し、その後配達を完了するために走行することができるため、より安全なオプションになります。」
M4は、トラックによる配達が入りにくい場所にも飛び込むことができます。
「トラックの配達ができない場所はたくさんあります。」と彼は言いました。
現時点では、M4は最高時速40マイルで移動することができ、バッテリーの充電で最大30分間使用することができます。しかし、チームはより長い飛行時間、より大きな積載量、およびより長い移動距離を持つ大型ドローンを設計するために取り組んでいます。
可能性は無限大です。
NVIDIA Jetson Nanoについて学びましょう。
We will continue to update VoAGI; if you have any questions or suggestions, please contact us!
Was this article helpful?
93 out of 132 found this helpful
Related articles





