「屋内モデリングのための3Dポイントクラウド形状検出」
3D Point Cloud Shape Detection for Indoor Modeling
ハンズオンチュートリアル、3D Python
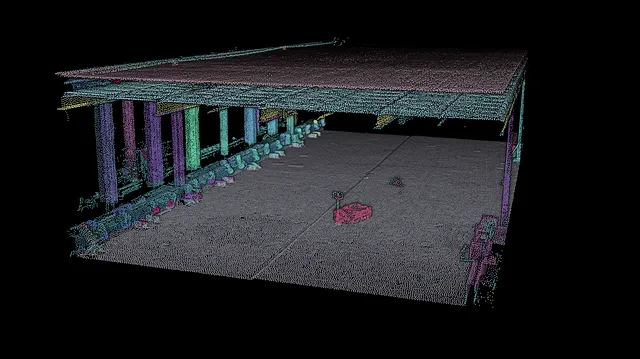
室内ポイントクラウドデータセットの空間占有3Dモデリングのための3D形状検出、セグメンテーション、クラスタリング、およびボクセル化を自動化するための10ステップPythonガイド
ポイントクラウドやデータ解析の経験がある場合、パターンを見つけることの重要性をご存知でしょう。類似したパターンを持つデータポイント、または「オブジェクト」を認識することは、より価値のある洞察を得るために重要です。私たちの視覚認知システムはこのタスクを簡単に達成しますが、この人間の能力を計算方法で再現することは大きな課題です。
目標は、人間の視覚システムが要素のセットをグループ化するという自然な傾向を利用することです。 👀
しかし、なぜそれは役に立つのですか?
まず第一に、データをセグメントにグループ化することで、データの特定の部分に簡単にアクセスして作業できます。第二に、個々のポイントではなく領域を見ることで、データ処理を高速化することができます。これにより、多くの時間とエネルギーを節約できます。そして最後に、セグメンテーションによって、生データを見るだけでは見ることができないパターンや関係性を見つけることができます。🔍 全体的に、セグメンテーションはポイントクラウドデータから有用な情報を得るために重要です。どうやってそれを行うかわからない場合でも、心配しないでください – 一緒に解決します!🤿
戦略
効率的な解決策でプロジェクトに取り組む前に、全体的なアプローチをフレームワーク化しましょう。このチュートリアルでは、以下の戦略図に示す10のステップからなる戦略を採用しています。
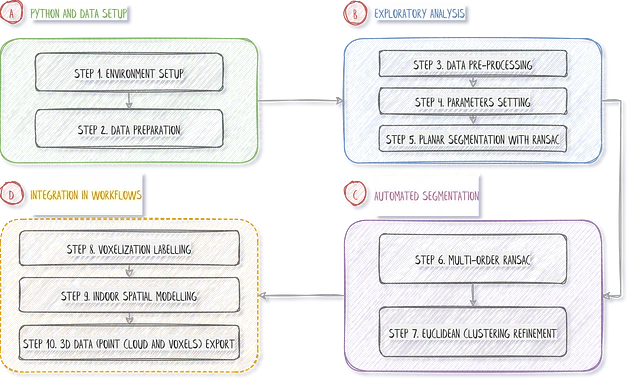
戦略が提示されており、以下では、異なるステップへのクイックリンクを見つけることができます:
ステップ1. 環境のセットアップステップ2. 3Dデータの準備ステップ3. データの前処理ステップ4. パラメータの設定ステップ5. RANSAC平面検出ステップ6. マルチオーダーRANSACステップ7. ユークリッドクラスタリングの改善ステップ8. ボクセル化ラベリングステップ9. 屋内空間モデリングステップ10. 3DワークフローエクスポートWe will continue to update VoAGI; if you have any questions or suggestions, please contact us!
Was this article helpful?
93 out of 132 found this helpful
Related articles





