Learn more about Search Results A - Page 656

- You may be interested
- 「LG AI Researchが提案するQASA:新しいA...
- 「ウェブ開発の未来:予測と可能性」
- アルゴリズムのバイアスの理解:タイプ、...
- ハスデックスとステーブルディフュージョ...
- データサイエンスチームの協力のための5つ...
- Concrete MLと出会ってください:プライバ...
- 「ジェネレーティブAIをマスターしたいな...
- テンセントAIラボの研究者たちは、テキス...
- 「LLMにおけるリトリーバル・オーグメンテ...
- プリンストン大学の研究者が、自然界の写...
- データベースの最適化:SQLにおけるインデ...
- オラクルと一緒にXRを開発しよう、エピソ...
- 人工汎用知能(AGI)の包括的な紹介
- コヒアAIがコヒアのEmbed v3モデルを公開...
- 『Google Vertex AI Search&Conversation...

「バイナリサーチアルゴリズムのデコーディングと例」
イントロダクション バイナリサーチアルゴリズムは、ソートされたデータセット内の特定のオブジェクトを検索するための効率的な検索技術です。このアルゴリズムは、データセットの中央値を決定して開始します。ターゲット値とこの中央値を比較し、次の3つのアクションのいずれかを実行します: 一致する場合、検索は成功し、ターゲット値のインデックスが返されます。 ターゲット値が中央要素を超える場合、検索はデータセットの半分で続行されます。 ターゲット値が小さい場合、左半分がさらに探索されます。 バイナリサーチは非常に効率的であり、データセットの要素数をnとすると、O(log n)の時間計算量を誇ります。これは、線形検索では実用的ではない大規模なデータセットにおいて、好まれる方法となります。ただし、データセットは事前にソートされている必要があります。 バイナリサーチとは? バイナリサーチは、コンピュータ科学や数学で広く使用されるアルゴリズムで、ソートされたデータセット内の特定の要素を見つけるために使用されます。このアルゴリズムは、データセットを繰り返し半分に分割し、ターゲット値を中央値と比較することで、ターゲット値が見つかるかどうかを確認します。 バイナリサーチの動作原理 バイナリサーチは、ソートされたデータ、分割統治、および検索範囲の縮小という3つの重要な概念に基づいて動作します。 ソート済みデータ バイナリサーチでは、データセットが昇順または降順でソートされている必要があります。ソートにより、中央要素との系統的な比較が可能となり、ターゲット値が左側にあるのか右側にあるのかを判断することができます。 分割統治 バイナリサーチは分割統治のポリシーに従います。まず、データセットの中央要素を調査し、それを2つの半分に分割します。次に、この中央要素をターゲット値と比較します。 一致する場合、検索は成功です。 ターゲット値が中央要素を超える場合、検索はデータセットの右半分で続行され、左半分は破棄されます。 ターゲット値が小さい場合、検索はデータセットの左半分で続行されます。 時間計算量の解析 バイナリサーチの各ステップでは、検索スペースが半分になります。したがって、1つのステップ後にはデータセットの半分だけを調べる必要があります。 次のステップごとに、検索範囲は半分になります。 この方法は、ターゲット値が見つかるか、検索スペースが空のデータセットになるまで続きます。これは、ターゲット要素が存在しないことを示します。 バイナリサーチの時間計算量は次のように解析できます: 1つのステップ後、検索範囲はN/2です(Nは要素数)。…

「NLPエンジニアになるには?キャリアロードマップ2023」
イントロダクション ますますデジタルな世界で、コンピュータが人間の言語を理解し、コミュニケーションする能力は、変革的な力となっています。自然言語処理(NLP)エンジニアは、この変革の牽引役です。彼らは、機械が人間のコミュニケーションの微妙なニュアンスを理解、操作、応答する力を与える魔法使いです。私たちの質問に答える仮想アシスタントからビジネス戦略を形成する感情分析まで、NLPエンジニアは人間の言語と人工知能の間のギャップを埋める存在です。この記事では、私たちはNLPエンジニアの魅力的な世界について探求し、彼らが技術とコミュニケーションの未来を形作る上でどれほど重要な役割を果たしているのかを見ていきます。 NLPエンジニアとは何ですか? NLPエンジニアは、コンピュータが人間の言語を理解し、操作するためのアルゴリズムとモデルを開発することに特化しています。彼らは、チャットボット、感情分析、言語翻訳など、さまざまなアプリケーションで重要な役割を果たしています。NLPエンジニアは、自然言語と機械のギャップを埋め、自動化システムが人間のコミュニケーションを効果的に解釈、生成、応答できるようにします。 必要なスキル 技術スキル PythonやJavaなどのプログラミング言語の熟練度: NLPエンジニアは、PythonやJavaなどの言語の強力なコーディングスキルを必要とします。これらの言語は、NLPのタスクによく使用されます。特にPythonは、NLPのための豊富なライブラリやフレームワークがあるため人気です。 TensorFlowやPyTorchなどの機械学習とディープラーニングのフレームワークの知識: 機械学習とディープラーニングは、NLPの基礎です。エンジニアは、TensorFlowやPyTorchなどのフレームワークを使いこなして、効果的にNLPモデルを構築し、トレーニングする必要があります。 NLTKやspaCyなどのNLPライブラリでの経験: NLTK(Natural Language Toolkit)やspaCyなどのNLPライブラリは、言語処理のタスクに対する事前に構築されたツールやリソースを提供します。これらのライブラリに精通していることで、NLPの開発を効率化することができます。 データの前処理と特徴エンジニアリングの専門知識: NLPはしばしば大きくて複雑なテキストデータを扱うことがあります。データの前処理、クリーニング、特徴エンジニアリングのスキルは、NLPタスクのためのデータの準備には欠かせません。 今日からNLP入門無料コースで旅を始めましょう! 専門スキル 強力な問題解決能力: NLPエンジニアは、複雑な言語理解の課題に取り組む必要があります。強力な問題解決スキルにより、効果的な解決策を考案することができます。 効果的なコミュニケーションと協力スキル: 明確なコミュニケーションは、非技術的な関係者に対してNLPの概念や調査結果を伝えるために不可欠です。多様な専門分野のチームで働く際には、協力スキルが重要です。 複雑なNLPプロジェクトの管理のためのプロジェクトマネジメント: NLPプロジェクトの管理には、目標の設定、タイムラインの策定、チームの協力が含まれます。プロジェクトマネジメントのスキルにより、プロジェクトの成功が保証されます。…
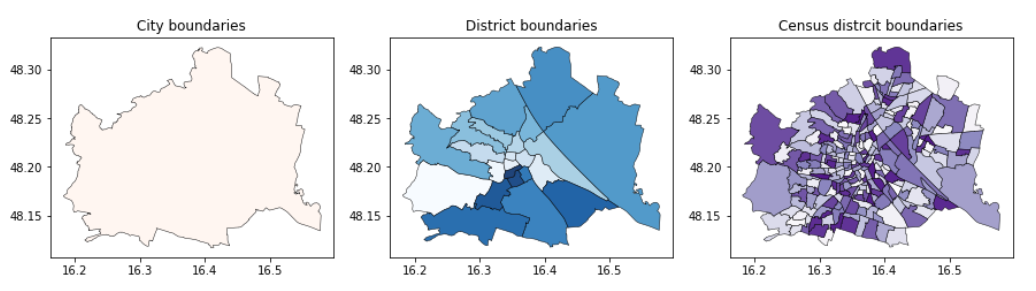
「ウィーンのオープンデータポータルを利用した都市緑地の平等性の評価」
特に、最近専門家や地方自治体の間で関心が高まっている都市開発の問題を提起しますこの問題は、緑の平等として知られる概念に関連しています

クローズドソース対オープンソース画像注釈
このブログでは、オープンソースとクローズドソースの画像注釈ツールを比較し、それがAIモデル開発者の生活を簡単かつ便利にする方法について述べています

「2023年に注目すべきトップ7のデジタルマーケティングのトレンド」
「2023年のデジタルマーケティングのトレンドを探索しましょう:AI、VR / ARコンテンツ、対話型マーケティング、インフルエンサー効果的な戦略で先を行きましょう」

「Pythonにおける記述統計と推測統計の適用」
データサイエンスの道を進むにつれて、知っておくべき基本的な統計情報を以下に示します

「コンピュータビジョンと言語モデルが見たものを理解する手助け」
研究者は、概念的な情報を理解する能力を向上させるために、合成データを使用してモデルを改善しますこれにより、自動キャプショニングや質問応答システムの性能が向上する可能性があります

「低コスト四足ロボットはパルクールをマスターできるのか? アジャイルなロボット運動のための革命的な学習システムを公開する」
複雑な物理的タスク、例えば困難な環境でのナビゲーションなどをロボットに実行させるという課題は、ロボティクスにおいて長年の課題となっています。この領域で最も困難なタスクのひとつは、パルクールです。パルクールは、障害物をスピードと敏捷性を持って乗り越えるスポーツであり、登攀、飛び越え、這いつくばり、傾くといったスキルの組み合わせが必要です。しかし、ロボットにとっては正確な調整、知覚、意思決定が必要であるため、特に困難です。この論文と記事が解決しようとする主要な問題は、ロボットにこれらの敏捷なパルクールのスキルを効率的に教える方法であり、それによってロボットが多様な現実世界のシナリオをナビゲートできるようにすることです。 提案された解決策に入る前に、現在のロボティックスの動きの最新状況を理解することが重要です。従来の方法では、制御戦略を手動で設計することが一般的であり、これは非常に労力を要し、さまざまなシナリオに対してより適応性が必要です。強化学習(RL)は、ロボットに複雑なタスクを教えるための有望な手法となっています。しかし、RLの手法は、探索やシミュレーションから実世界への学習済みスキルの転送に関連する課題に直面しています。 さて、研究チームがこれらの課題に取り組むために導入した革新的な手法を探ってみましょう。研究者たちは、ロボットにパルクールのスキルを効果的に教えるために開発された2段階のRL手法を開発しました。彼らの手法のユニークさは、初期のトレーニングフェーズ中に「ソフトダイナミクスの制約」を統合することにあり、これは効率的なスキル獲得に不可欠です。 研究者たちの手法は、その効果を高めるいくつかの要素から成り立っています。 1. 特化したスキルポリシー: この手法の基盤は、パルクールに不可欠な特化したスキルポリシーの構築です。これらのポリシーは、再帰型ニューラルネットワーク(GRU)と多層パーセプトロン(MLP)を組み合わせて関節位置を出力することで作成されます。これらのポリシーは、深度画像、プロプリオセプション(体の位置を認識する能力)、前のアクションなど、さまざまなセンサー入力を考慮に入れています。これらの入力の組み合わせにより、ロボットは環境に基づいた情報に基づいて的確な判断を行うことができます。 2. ソフトダイナミクスの制約: この手法の革新的な側面は、初期のトレーニングフェーズ中に「ソフトダイナミクスの制約」を使用することです。これらの制約は、ロボットに環境に関する重要な情報を提供することで学習プロセスをガイドします。ソフトダイナミクスの制約を導入することで、研究者たちはロボットが効率的にパルクールのスキルを探索し、学習することを保証します。これにより、学習が速くなり、パフォーマンスが向上します。 3. シミュレートされた環境: 研究者たちはIsaacGymを使用して作成されたシミュレートされた環境を特化したスキルポリシーのトレーニングに使用しています。これらの環境には40のトラックがあり、それぞれに20の難易度の異なる障害物が含まれています。障害物の特性(高さ、幅、奥行きなど)は、トラックごとに線形的に複雑さが増しています。このセットアップにより、ロボットは徐々に難しいパルクールのスキルを学習することができます。 4. 報酬構造: 強化学習において報酬構造は重要です。研究者たちは、それぞれの特化したスキルポリシーに対して報酬項目を細かく定義しています。これらの報酬項目は、速度、エネルギー保存、貫通深度、貫通ボリュームなどの具体的な目標と一致しています。報酬構造は、望ましい行動を奨励し、望ましくない行動を抑制するように注意深く設計されています。 5. ドメイン適応: シミュレーションで学習したスキルを実世界に転送することは、ロボティクスにおいて重要な課題です。研究者たちは、このギャップを埋めるためにドメイン適応技術を使用しています。ロボットは、シミュレートされた環境で獲得したパルクールの能力を実践的な状況に適応させることができます。 6. ビジョンの重要性: ビジョンは、ロボットが敏捷にパルクールを実行するための重要な役割を果たします。深度カメラなどのビジョンセンサーは、ロボットに周囲の重要な情報を提供します。この視覚的な認識により、ロボットは障害物の特性を感知し、敏捷な操作に備え、障害物に接近する際に的確な判断を行うことができます。 7. パフォーマンス:…
『リンゴールド・ティルフォードアルゴリズムの解説とウォークスルー』
1981年のReingold-Tilfordアルゴリズムは、ノードを木構造に配置して読みやすさを最大化することで、階層データの視覚的に魅力的な表現を作成します言い換えると、それはアルゴリズムです...

「ギザギザしたCOVIDチャートの謎を解決する」
COVID-19パンデミックの最初の年において、この病気の死亡者数は多くの論争の的となりました問題の中には、テストの不足による早期の過小評価や死亡者数の…
Find the right Blockchain Investment for you
Web 3.0 is coming, whether buy Coins, NFTs or just Coding, everyone can participate.